 |
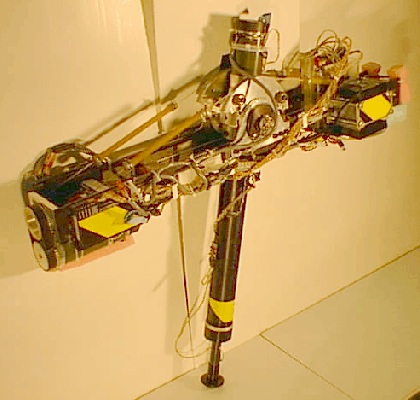
ARL Monopod II is a second generation of its earlier model called ARL Monopod (or ARL Monopod I). Some parts and sub-assemblies in the newer robot are inherited from the older one, which could also justify some similarities in their appearance! With the rubber springs in the hip joint and helical spring in the knee, the monopod serves as a platform to study the control of "Passive Dynamic Running." Starting from un-actuated passive behaviour of the robot, we derive the desired joint trajectories. Tracking these nominal trajectories by the joint controllers results in a stable, almost passive motion which needs little power to maintain the motion. |
Maximum speed so far is about 4.5 km/h (1.25 m/s). At this speed the total output power, measured at the motor shafts, is about 50 Watts! The specific resistance of the robot which is calculated by dividing the power by weight and velocity of the robot (E = P/(wv)) is reduced down to 0.21 from 0.7 for ARL Monopod I.

Spring System (622 Kb MPEG) |

In Action (414 Kb MPEG) |
© 1999 Ambulatory Robotics Laboratory
All Rights Reserved