| SCOUT I | |
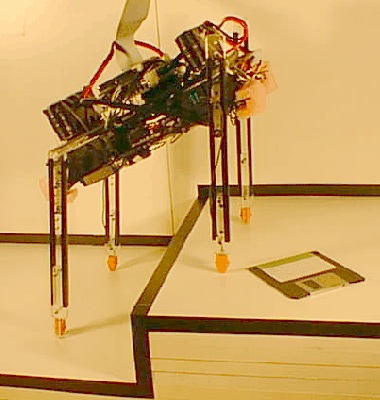 |
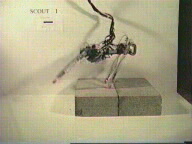
Scout I was developed for ARL to explore a minimal approach to legged locomotion. Each of the legs has only 1 revolute joint totaling 4 actuated degrees of freedom for the robot. In addition, a minimum of sensors are used. For Scout I to perform all of its behaviors, only the leg angles relative to the body and toe touchdown with the ground need to be measured. For analysis purposes, body angle can also be sensed by measuring the angular velocity with a rate gyro and integrating the results. With this very simple mechanical configuration and by using R/C components wherever possible, the cost of the robot has been kept below $1500 CAN (About $1000 US) not including the external PC. Despite these potentially stifling limitations, Scout I is capable of a wide variety of behaviors. To date, these include walking, turning, side stepping, sitting and laying down, and climbing a 90 mm step (although reliability with step climbing is poor). In December 1998 the robot was modified so that each leg has a prismatic spring joint. Walking and running with this new configuration are currently being explored. |
|
|
Length
Width Height Leg Length Hip Separation (Between the front and back hips) |
0.26 m
0.23 m 0.27 m 0.20 m 0.20 m |
|
|
Overall | 2.3 kg |
|
|
Source
Total Capacity Robot Endurance |
2 NiCd Battery Packs
2.6 Ahr @ 6.0 V 10 min Continuous Walking |
|
|
Source
Iteration Rate |
External Pentium 100
1 kHz |
|
|
Source
Rated Output (Stall) |
4 R/C Servo Motors
1.96 Nm at Each Hip Joint |
|
|
Angular Rate Gyro
R/C Servo Potentiometers Roller Lever Switches IR Sensors |
Body Angular Velocity
Leg Angles Relative to Body Foot Contact With Ground Foot Contact With Ground |
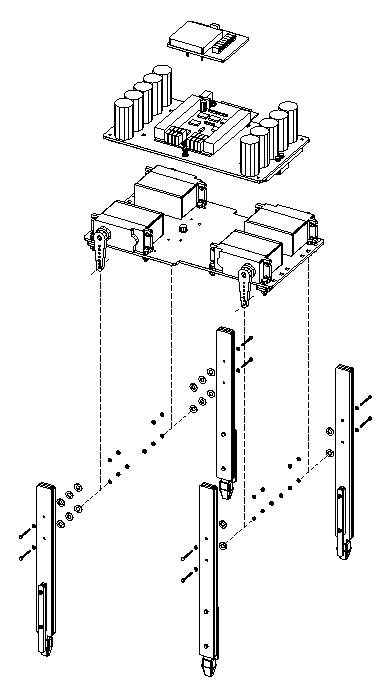
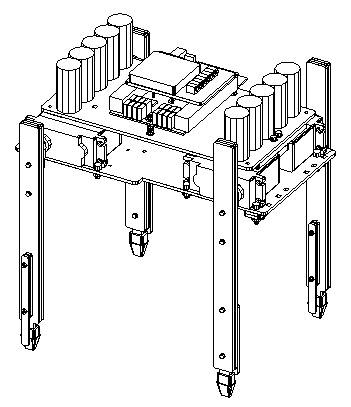
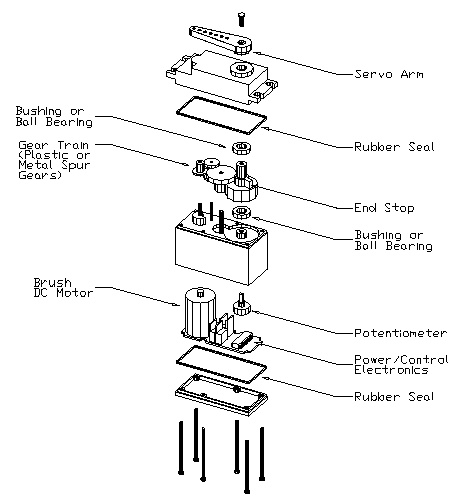
Scout I Assembly Drawings
Scout
I Exploded View
Scout
I Assembled View
R/C
Servo Exploded View
{kind=link}
{kind=link}
{kind=link}
Walking in Mobile
|
Walking in Working Model
|
Climbing in Working Model
|
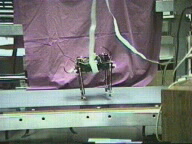
Walking
|

Turning
|
Step Climbing
|
Side Stepping
|
Sitting Down
|

Laying Down
|
{kind=link}