| It is clear that to trot, the robot needs knees. The simulation
below shows the Scout II trotting. To keep the robotic system simple,
energy efficient, and light weight, I decided to investigate trotting with
unactuated knees - that is, the knees have no motor or actuator.
They rely on the dynamic coupling between the upper and the lower leg for
angular control. The knees do have a locking mechanism which enables
it to lock every 10 degrees using a magnetic latching solenoid. The problem
with unactuated systems is that both the passive and the active joints
cannot be controlled at the same time. Therefore, the system equations
of motion were modeled in Matlab and solved while iterating through initial
conditions and other leg trajectory parameters to determine the best sets
for achieving toe clearance and a consistent stride. The system was
simulated in the Working Model simulation environment, and the robot was
made to trot experimentally. |
 |
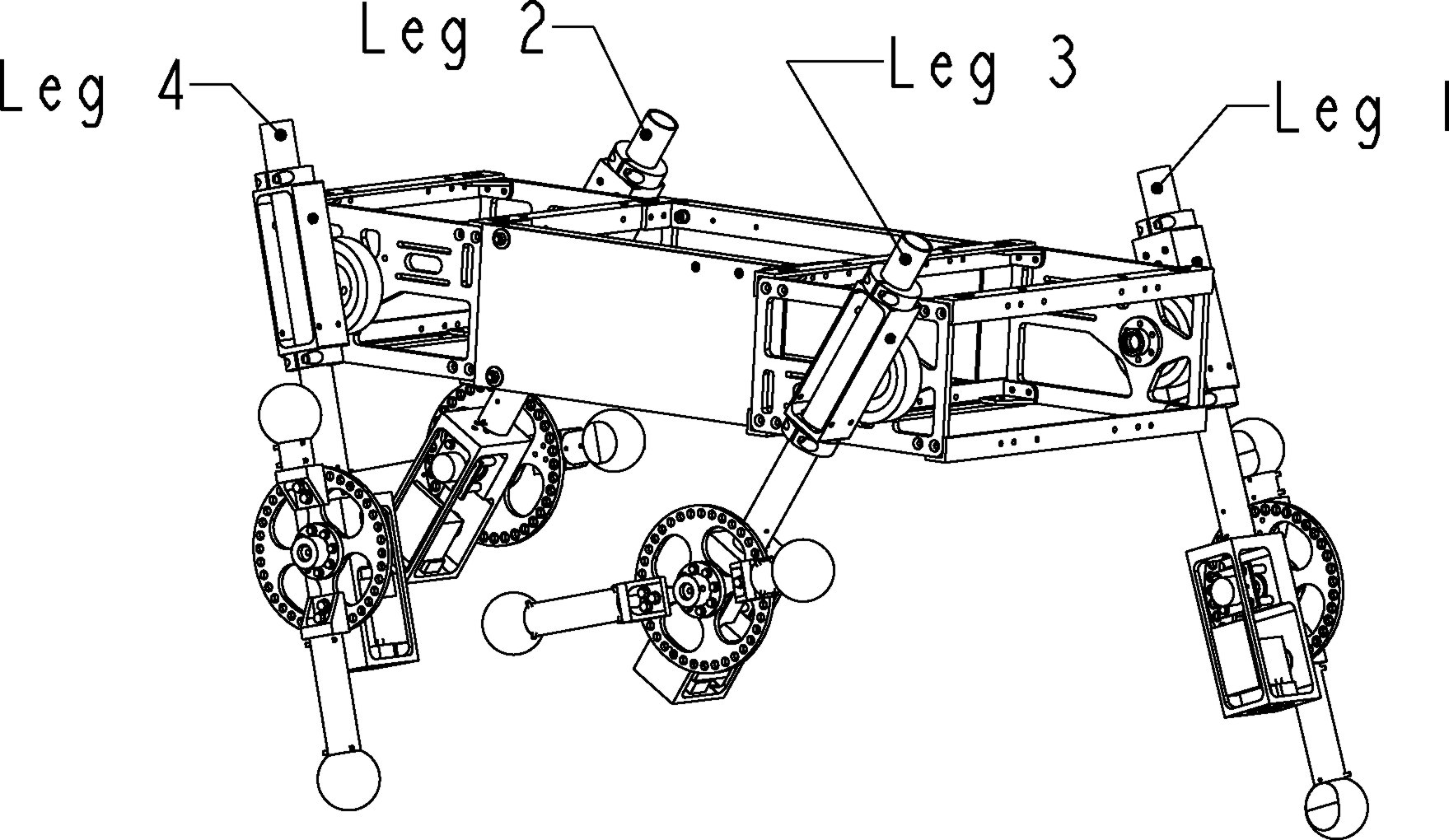 |
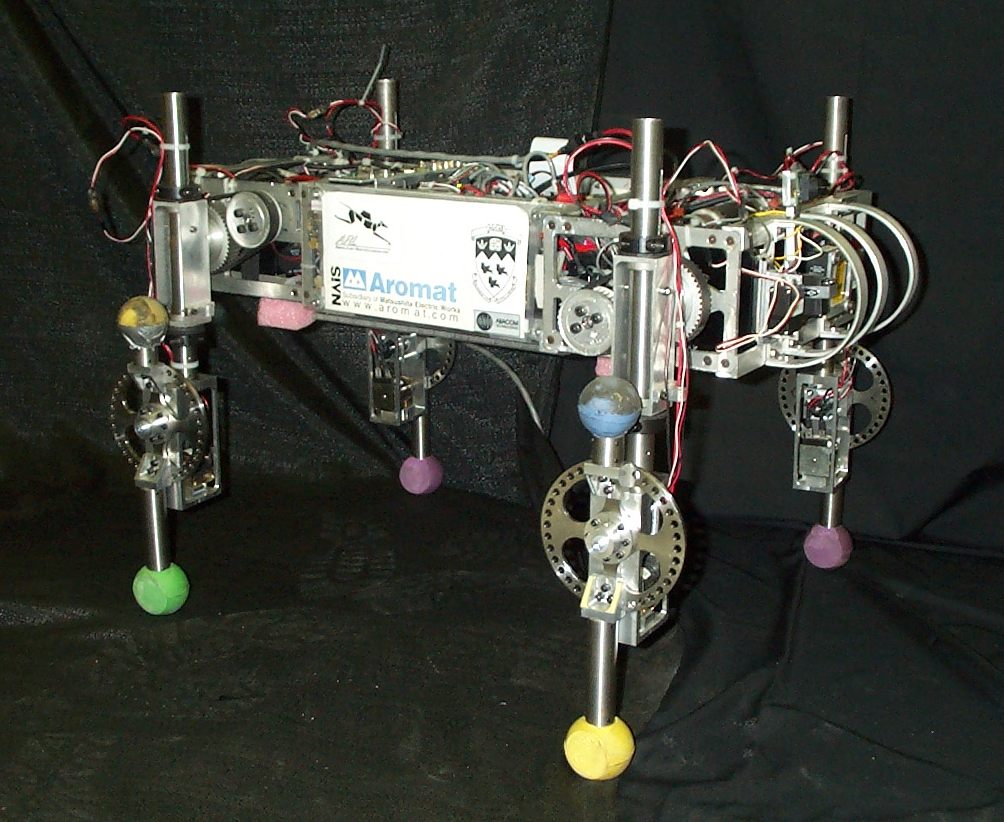
| Scout II with passive knees |
Scout II with passive knees as rendered in ProEngineer |
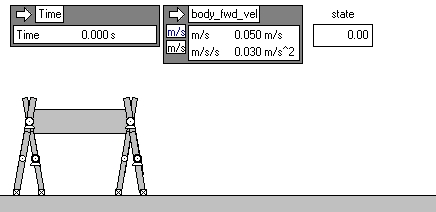
Simulation Results
click image to view simulation (avi 400 KB)
|
Trotting simulation - controlled velocity trot algorithm following
a ramp up,
hold at 0.4 m/s, then ramp down
|
Videos
Note : click on image for
high resolution video (>2.0 Mb),
or on the link below the image
for lower resolution video (<2.0 Mb)
 lower
resolution video
lower
resolution video
(771
kb)
|
This video shows Scout II on a stand with one leg moving through a
trot motion. It can be seen that the knee unlocks and the knee angle
is controlled by the motion of the hip. Concurrently, the entire
leg swings forward and at the time of knee lock, it is in a position that
would be appropriate for touchdown. The final motion is the support
phase of a trot cycle where the knee is locked. Three different views
of the motion are presented.
|
 lower
resolution video
lower
resolution video
(235
kb)
|
This video shows all four legs operating together in a trot cycle while
the robot is on a stand.
|
 lower
resolution video
lower
resolution video
(828
kb)
|
This video shows the robot performing a step-trot, where it comes to
rest after every step. The first sequence shows the robot moving
from right to left without the treadmill moving. The second sequence
shows a front view of the same motion. The final sequence shows the
step-trot for a long period with the treadmill moving. |
 lower
resolution video
lower
resolution video
(1.06
Mb)
|
This video shows the robot walking with a controlled velocity trot.
The treadmill is turned on, and the robot follows a ramping up and down
profile similar to (but slower than) the simulation video above.
|
© 1999 Ambulatory Robotics Laboratory
All Rights Reserved
|